В чем разница между коллекторными и бесколлекторными моторами?
Содержание:
- Минусы коллекторных моторов
- Пример использования
- Описание и принцип работы[2]
- Форма патрубков коллектора
- Виды электродвигателей
- Двигатель постоянного тока: коллекторный или бесколлекторный?
- Конструкции и типы синхронного электродвигателя с постоянными магнитами
- Выбор частоты ШИМ
- Трехфазные бесколлекторные электродвигатели
- Принцип работы бесколлекторного мотора
- Бесколлекторник своими руками
- Обозначения бесколлекторных моторов[править]
- Литература
- Принципы работы
- Работа электродвигателя постоянного тока
- Тестирование работы схемы
Минусы коллекторных моторов
Сами по себе коллекторные моторы неплохо справляются со своей работой, но это лишь до того момента пока не возникает необходимость получить от них на выходе максимально высокие обороты. Все дело в тех самых щетках, о которых упоминалось выше. Так как они всегда находятся в плотном контакте с коллектором, то в результате высоких оборотов в месте их соприкосновения возникает трение, которое в дальнейшем вызовет скорый износ обоих и в последствии приведёт к потере эффективной мощности эл. двигателя. Это самый весомый минус таких моторов, который сводит на нет все его положительные качества.
Пример использования
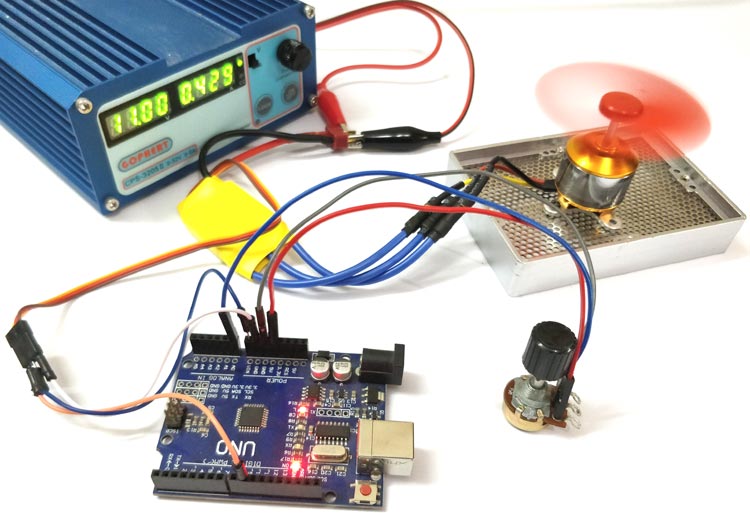
В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino. Нам потребуются следующие компоненты:
Плата Arduino Uno – 1;
Плата прототипирования – 1;
Мотор бесколлекторный – 1;
Потенциометр 10 кОм – 1;
Блок питания 12 В – 1;
Для калибровки в процедуре setup() производим эмуляцию перевода потенциометра м максимальное и минимальное положение. Содержимое скетча показано в листинге 2.
После запуска Arduino в процедуре setup() происходит калибровка регулятора, и в процедуре loop() мотор крутится со скоростью, соответствующей положению потенциометра.
Часто задаваемые вопросы
1. Не запускаются моторы
Проверьте подключение моторов к ESC-регулятору, ESC-регулятора к блоку питания и Arduino.
Источник
Описание и принцип работы[2]
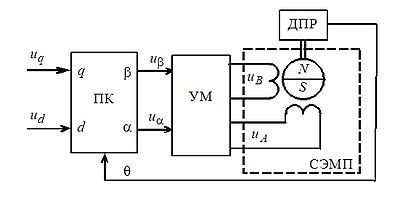
ПК — преобразователь координат, УМ — усилитель мощности, СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
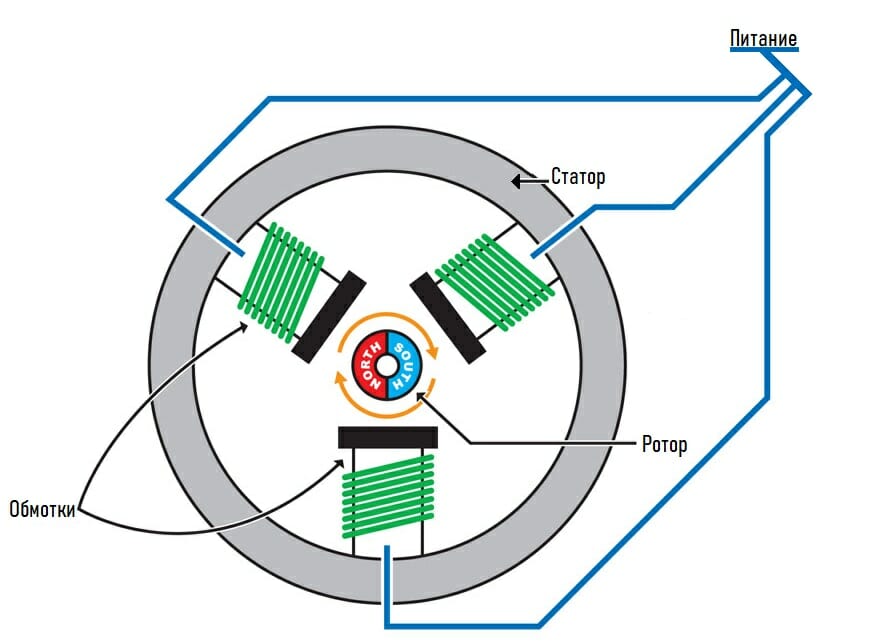
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока uq{\displaystyle u_{q}}, действие которого аналогично напряжению якоря двигателя постоянного тока, и ud{\displaystyle u_{d}}, аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы ud,uq{\displaystyle u_{d},u_{q}}, представляют собой проекции вектора напряжения управления Uy→={ud,uq}{\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат {d,q}{\displaystyle \{d,q\}}, связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций ud,uq{\displaystyle u_{d},u_{q}} в проекции uα,uβ{\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат {α,β}{\displaystyle \{\alpha ,\beta \}}, связанной со статором.
Как правило, в системах управления электропривода задаётся ud={\displaystyle u_{d}=0}, при этом уравнения преобразования координат принимают вид:
uα=−uq⋅sinθ,{\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
uβ={\displaystyle u_{\beta }=} uq⋅cosθ,{\displaystyle u_{q}\cdot \cos {\theta },}
где θ{\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α{\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ{\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, uq{\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала uq{\displaystyle u_{q}}, формирует гармонические сигналы uα,uβ{\displaystyle u_{\alpha },u_{\beta }}, которые усилитель мощности (УМ) преобразует в фазные напряжения uA,uB{\displaystyle u_{A},u_{B}}. Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Форма патрубков коллектора
Так как в конструкции необходимо соблюдать точность, особенное внимание уделяется патрубкам. Каналы должны соответствовать точным параметрам длины и формы, в них недопустимы различные искривления и углы. Причин для этого несколько:
Причин для этого несколько:
- оседание топлива на стенках;
- резонанс Гельмгольца;
- расчет давления для работы системы.
Первая причина проста, ведь топливо при острых углах и выступах будет лишь оседать на них
Это в будущем может привести к засорам и сужению канала, поэтому важно избегать таких недостатков

Вторая причина – частая проблема у конструкторов. Резонансом Гельмгольца называется противодействие воздушного потока. Когда впускной клапан открывается, то смесь движется по патрубкам к цилиндру. В момент его закрытия поток прекращается, но инерция не исчезает. В результате смесь давит на клапан, формируя высокое давление в данной области. Этим же давлением она выталкивается назад, создавая противодействие при следующем впуске. В результате технические характеристики коллектора существенно ухудшаются, а многие элементы подвергаются повышенному износу.
Интересно! Сейчас на многих двигателях внедряются новые особенности конструкции, направленные на снижение эффекта Гельмгольца, но полностью устранить его довольно трудно.
Последняя же причина – расчет давления для работы системы. Если длина патрубков будет излишне велика, то системе придется возмещать давление в этой области для нормального движения топлива, что приводит к дополнительному износу системы.
Виды электродвигателей
Существуют следующие типы двигателей постоянного тока:
- с возбуждением при помощи постоянных магнитов;
- с последовательным соединением якоря и обмоток возбуждения;
- с параллельным соединением якоря и обмоток возбуждения;
- со смешанным соединением якоря и обмоток возбуждения;
- вентильный двигатель (бесколлекторный двигатель постоянного тока), выполненный при помощи замкнутой системы; в таком типе двигателя используется инвертор (силовой полупроводниковый преобразователь), преобразователь координат и ДПР (датчик положения ротора).
Двигателем переменного тока называют электрический двигатель, питание которого обеспечивает переменный ток. Существуют следующие типы двигателей переменного тока:
- гистерезисный двигатель;
- вентильный реактивный двигатель;
- асинхронный электродвигатель с частотой вращения ротора, отличающейся от частоты вращения создаваемого напряжением магнитного поля;
- синхронный электродвигатель с частотой вращения ротора, совпадающей с частотой вращения создаваемого напряжением магнитного поля.
Также существует УКД (универсальный коллекторный двигатель) с функцией режима работы как на переменном, так и на постоянном токе.
Ещё один тип двигателей – это шаговый электродвигатель с конечным числом положений ротора. Определённое указанное положение ротора фиксируется при помощи подачи питания на необходимые соответствующие обмотки. При снятии напряжения питания с одной обмотки и его передаче на другие происходит процесс перехода в другое положение.
Двигатель переменного тока при питании посредством промышленной сети обычно не позволяет достичь частоты вращения более трёх тысяч оборотов в минуту. По этой причине при необходимости получить более высокие частоты используется коллекторный двигатель, дополнительными преимуществами которого является лёгкость и компактность при сохранении необходимой мощности.
 Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Ресурс любого асинхронного двигателя переменного тока заметно выше коллекторного. Определяется он состоянием изоляции обмоток и подшипников. Синхронный же двигатель при использовании инвертора и датчика положения ротора считается электронным аналогом классического коллекторного двигателя, поддерживающего работу посредством постоянного тока.
Двигатель постоянного тока: коллекторный или бесколлекторный?
Идеальных решений в инженерии не существует, однако подобрать оптимальный вариант, который будет наилучшим образом соответствовать поставленным целям и задачам, можно всегда. Перед разработчиками любого оборудования, от простейшего до самого сложного, всегда стоит множество задач, которые требуют решения, и многие из них представляются в формате «или/или». Так, при использовании в механизмах электродвигателей постоянного тока часто возникает вопрос: отдать предпочтение коллекторному (щёточному) или бесколлекторному (бесщёточному) агрегату?
Коллекторные двигатели постоянного тока
Применение щёточных электродвигателей постоянного тока актуально в устройствах, работающих на умеренных и низких скоростях. Их основными преимуществами являются экономичность, простота использования и отсутствие встроенной электроники, благодаря которому двигатели такого типа легко справляются с кратковременными перегрузками.
Для обеспечения длительного срока службы коллекторному электродвигателю требуются грамотная эксплуатация и квалифицированное обслуживание: так, важно учитывать, что при работе такого двигателя на чрезмерно высоких скоростях щётки могут лететь с коллектора, а прохождение через механизм тока определённой плотности может стать причиной выгорания щёток. При эксплуатации коллекторного двигателя постоянного тока может потребоваться использование дисульфида молибдена или карбоната лития
Наличие щёток и коллектора сказывается на габаритах устройств: они значительно больше и тяжелее бесщёточных механизмов. Необходимость регулярного обслуживания ограничивает возможности свободной установки электродвигателя, делая необходимостью его размещение в доступном месте. Внутреннее расположение ротора усложняет теплообмен, а падение напряжения на щётках неминуемо ведёт к снижению эксплуатационных свойств электродвигателя.
Трение щёток о коллекторные контакты, неминуемо возникающее при работе щёточного электродвигателя, приводит к таким негативным последствиям, как снижение эффективности, высокий уровень шума, возникновение электромагнитных помех и возникновение искр: именно по этой причине коллекторные двигатели постоянного тока никогда не используются для работы во взрывоопасной среде.
Бесколлекторные двигатели постоянного тока
Отсутствие в бесколлекторных электродвигателях (BLDC) коллектора и щёток делает их более лёгкими и компактными, сокращает необходимое обслуживание до минимума и даёт ротору возможность вращения на более высокой скорости. Таким образом, отсутствие «проблемных» деталей лишило бесщёточные электродвигатели недостатков, свойственных щёточным агрегатам. Тем не менее, бесколлекторные двигатели имеют свои недочёты, главные из которых – конструктивная сложность и наличие встроенной электроники, делающее такие механизмы более дорогими, чем коллекторные.
Таким образом, выбирая между коллекторным и бесколлекторным двигателем постоянного тока, опираться нужно на такие факторы, как:
— финансовые возможности;— требования к характеристикам устройства;— наличие возможности обеспечения квалифицированного обслуживания;— сфера применения (учитываются шумность, возможность возникновения искр).
Широкий выбор щёточных и бесщёточных электродвигателей постоянного тока представлен в каталоге торгового дома Степмотор.
Источник
Конструкции и типы синхронного электродвигателя с постоянными магнитами
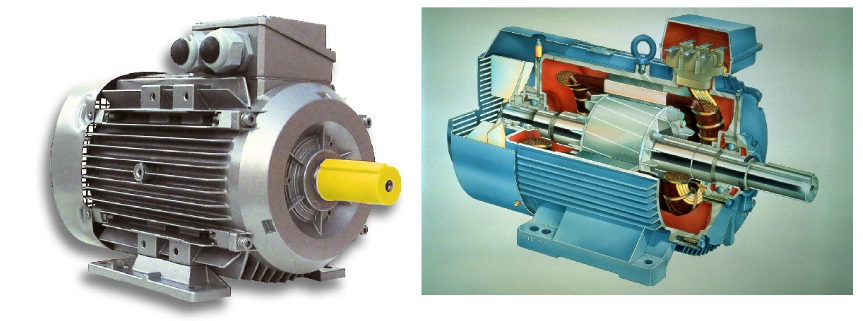
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор – неподвижная часть, ротор – вращающаяся часть.
Синхронный электродвигатель со встроенными постоянными магнитами
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором – электродвигатели обращенного типа.
Конструкции синхронного двигателя с постоянными магнитами: слева – стандартная, справа обращенная.
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
- По конструкции ротора синхронные двигатели делятся на:
- электродвигатели с явно выраженными полюсами;
- электродвигатели с неявно выраженными полюсами.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.
Сечение роторов с разным отношением Ld/Lq. Черным обозначены магниты. На рисунке д, е представлены аксиально-расслоенные роторы, на рисунке в и з изображены роторы с барьерами.
- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов(англ. SPMSM – surface permanent magnet synchronous motor);
- синхронный двигатель со встроенными (инкорпорированными) магнитами(англ. IPMSM – interior permanent magnet synchronous motor).
Ротор синхронного двигателя c поверхностной установкой постоянных магнитов
Ротор синхронного двигателя со встроенными магнитами
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.
Статор электродвигателя с распределенной обмоткой
Статор электродвигателя с сосредоточенной обмоткой
Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3,…., k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток – невозможность влияния на форму кривой ЭДС .
Схема трехфазной распределенной обмотки
Схема трехфазной сосредоточенной обмотки
Форма обратной ЭДС электродвигателя может быть:
трапецеидальная;
синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора .
Выбор частоты ШИМ
Предположим ситуацию, когда, частота ШИМ 8 кГц, скважность 100% (полный газ), двигатель вращается со скоростью, при которой частота коммутаций тоже равняется 8 кГц. Т.е
от момента переключения ключей до следующего переключения проходит ровно один период ШИМ сигнала. Если скорость вращения возрастёт и частота коммутаций превысит частоту ШИМ, возникнет ситуация, при которой ШИМ сигнал будет удерживать ключи открытыми дольше необходимого и противодействовать вращению двигателя. Кроме того, измерение напряжения на свободной фазе синхронизированы частотой ШИМ сигнала, поэтому нет технической возможности вычислить скорость коммутации выше частоты ШИМ. Другими словами контролер теоретически не сможет управлять двигателем, если тот вращается со скоростью, при которой частота коммутаций превышает частоту ШИМ сигнала. Это только теоретические расчеты. На практике, желательно чтобы частота ШИМ в несколько раз превышала частоту коммутаций.
Например, имеем регулятор с частотой ШИМ 8 кГц, и двигатель с 14 магнитами.
Максимальная теоретически возможная частота вращения вала двигателя будет:
V=(Q/6/(N/2)*60);
Q — частота ШИМ в герцах
6 — количество коммутаций за один электрический оборот
N — количество магнитов
60 — количество секунд в минуте
V=((8000/6/(14/2))*60) = 11428 об/мин.
Двигатель с 28 магнитами:
V=((8000/6/(28/2))*60) = 5714 об/мин.
Т.е. если вам нужно управлять многополюсным двигателем на высоких оборотах, придется использовать регулятор с более высокой частотой ШИМ.
Например, чтобы раскрутить двигатель с 24 магнитами до 10000 об/мин понадобится регулятор с частотой ШИМ не ниже 24кГц. Нужно так же помнить, что чем выше частота ШИМ, тем больше переходных процессов происходит на ключах за единицу времени. Это может привести к увеличению потерь и к увеличению тепловыделения на ключах.
Статьи по бесколлекторным моторам:
- Что такое Бесколлекторный мотор?
- Устройство бесколлекторного мотора
- Как управлять бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Как управлять бесколлекторным мотором без датчиков (Sensorless BLDC)
- Запуск бездатчикового бесколлекторного мотора (Sensorless BLDC)
- Определение положения ротора бесколлекторника в остановленном состоянии
- Контроллер бесколлекторного мотора. Структура ESC
- Схема контроллера бесколлекторного мотора (ESC)
- Силовая часть контроллера бесколлекторного мотора
- Литература по бесколлекторнм моторам
- Примеры на С для управления бесколлекторными моторами
- Схема контроллера бесколлекторного мотора BLDC, PMSM на микроконтроллере STM32
- STM32. Управление бесколлекторным мотором (BLDC)
- STM32. Пример регулятора для бесколлекторного PMSM
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление
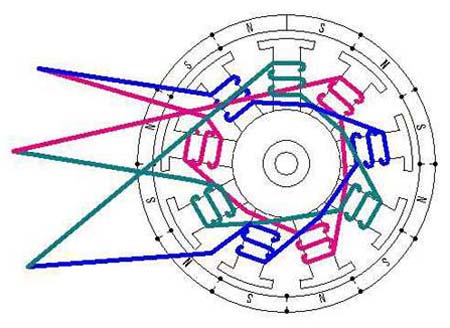
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током.
Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи.
Они позволяют из постоянного напряжения сделать трехфазные импульсы.
Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Принцип работы бесколлекторного мотора
Здесь все наоборот, у моторов бесколлекторного типа отсутствуют как щетки так и коллектор. Магниты в них располагаются строго вокруг вала и выполняют функцию ротора. Обмотки, которые имеют уже несколько магнитных полюсов, размещаются вокруг него. На роторе бесколлектоных моторов устанавливается так называемый сенсор (датчик) который будет контролировать его положение и передавать эту информацию процессору который работает в купе с регулятором скорости вращения (обмен данными о положении ротора происходит более 100 раз в секунду). На выходе мы получаем более плавную работу самого мотора с максимальной отдачей.
Бесколлекторные моторы могут быть с датчиком (сенсором) и без него. Отсутствие датчика незначительно снижает эффективность работы мотора, поэтому их отсутствие вряд ли расстроит новичка, но зато, приятно удивит ценник. Отличить друг от друга их просто. У моторов с датчиком, помимо 3-х толстых проводов питания есть еще дополнительный шлейф из тонких, которые идут к регулятору скорости. Не стоит гнаться за моторами с датчиком как новичку так и любителю, т.к их потенциал оценит только профи, а остальные просто переплатят, причем значительно.
Бесколлекторник своими руками
@@Конструктивные особенности CD-ROM движков очень разные. Поэтому в этой статье даются общие рекомендации по переделке таких двигателей с минимальными затратами в 3 фазные авиамодельные двигатели.
@@Требования к CD-ROM движкам (данные приведены для двигателей, которые реально переделывались):
- Число зубцов (полюсов) ротора должно быть равным 9
- Количество устанавливаемых заново магнитов — 12
- Диаметр ротора: 28.5 мм
- Высота ротора: 7.8 мм
- Диаметр оси: 3 мм
- Длина оси: 6.8 мм
- Диаметр статора: 24 мм
- Высота статора: 5.2 мм
- Вес переделанного двигателя — 21 г
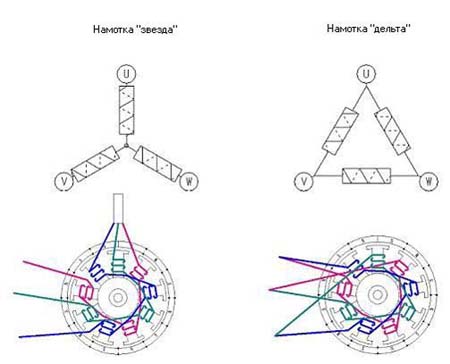
- Тип намотки — дельта
- Намотка проводом диаметром — 0,4-0,5 (желательно ПЭТВ)
- Количество витков — 17-20 на зуб




@@Используемые клеи: «111», фиксаторы резьбы (продаются в автомагазинах). @@Используемая эпоксидная смола: любая не российская и не 5-минутка.
Подготовительные работы
@@На внутренней стороне ротора приклеено намагниченное пластмассовое кольцо. Аккуратно удалите его. Это можно сделать следующим образом: согнутый и нагретый гвоздь вводится в пластмассу
Даем ему остыть, и осторожно вытягиваем пластмассовое кольцо
@@Статор отсоединяем от пластины, на которой он крепится (вариантов крепления очень много и поэтому я не привожу технологию — в каждом конкретном случае решайте сами как это сделать). Отсоединения статора, аккуратно удаляем с него намотку, Стараемся не повредить заводскую лакировку.
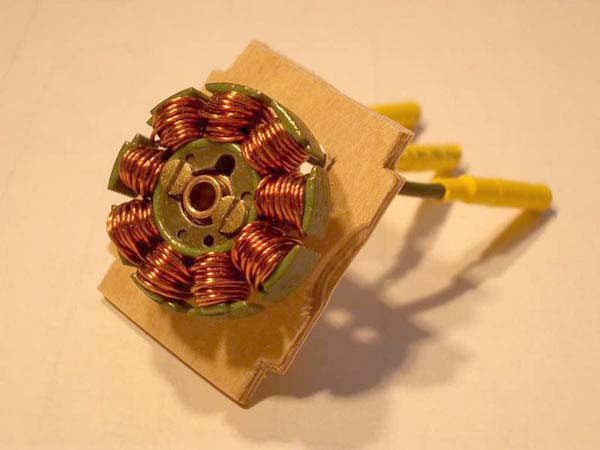
Перемотка
@@Перемотку статора ведут медным проводом, диаметром 0.4mm — 0.5mm. На каждый полюс мотаем от 17 до 20 витков.
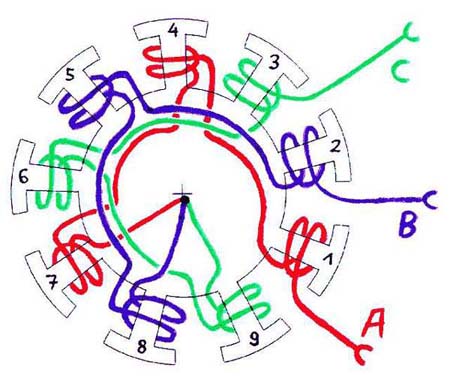
@@Чем меньше витков, тем больше обороты, большее количество витков позволяет получить более высокий вращающийся момент. Изоляция провода должна остаться неповрежденной — это критично, иначе ваш двигатель не будет работать.
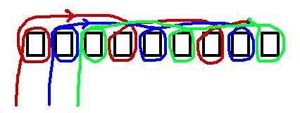
@@Вы можете выбрать между типом намотки «дельты» и «звезда». С намоткой «звезда» двигатель будет иметь более высокий вращающий момент, меньше оборотов в минуту и будет «есть» меньше. Намотка «дельта» даст «более горячий» двигатель с более высокими оборотами в минуту и большим КПД, но будет иметь больший «аппетит» и будет греться больше. Намотка «звезда» «тяжелее» для работы контроллера.



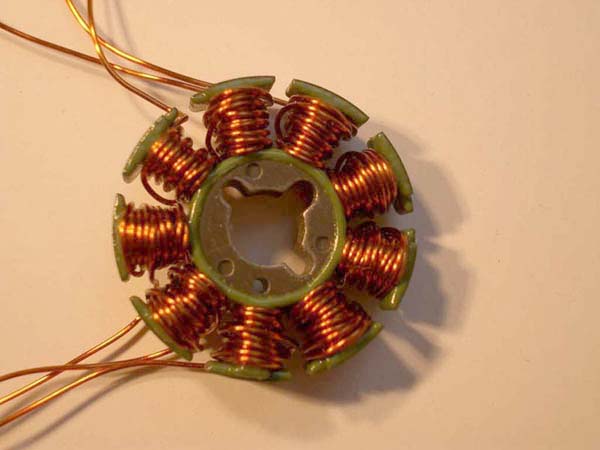

Проверка качества
@@Проверка качество намотки производится мультиметром. Провод НЕ ДОЛЖЕН быть сломан или с поврежденной изоляцией. Сопротивление обмоток должно быть примерно одинаковым. Провода обмотки не должны быть закорочены между собой или на статор (в случае повреждения изоляции). Если вы не уверены, что нет повреждений или «коротыша» — снимайте намотанный провод и мотайте еще раз. Соедините, закрепите и пропаяйте выводы обмоток. Сопротивление обмоток ~ 0,1-0,14 ом на фазу.
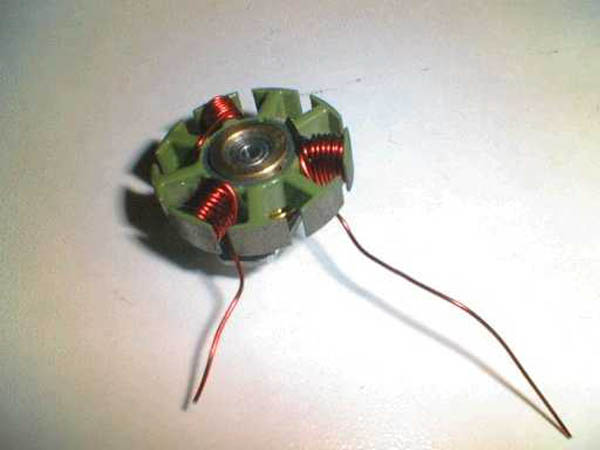
Установка новых магнитов в ротор
@@ОЧЕНЬ ВАЖНО — магниты должны быть установлены с соблюдением полярности — N-S-N-S …, иначе ваш двигатель не будет работать. Хороший способ проверять полярность состоит в том, чтобы разместить 12 магнитов на столе в один ряд, в таком же порядке приклеивать магниты в стакан ротора
Для приклеивания используйте высококачественный клей (не используйте эпоксидную смолу 5-минутку).
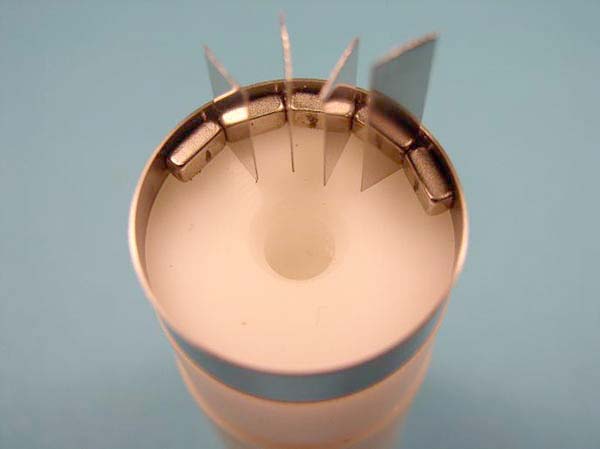


@@Добейтесь равномерного размещения магнитов в стакане ротора. Как можно это сделать: устанавливая магниты в стакан, прокладывайте их тонкими кусочками бумаги одинаковой толщины, если один из зазоров получился больше, то увеличьте толщину бумаги. Расстояние между магнитами должно быть одинаковым. Не пожалейте времени, чтобы сделать эту работу. После установки магнитов и их приклейки, заполните промежутки между ними эпоксидной смолой. Будьте осторожны, не перелейте смолы.
Испытание
@@Трения между ротором и магнитами не должно быть. Если движение при проворачивании без значительного усилия и толчков, то можете пробовать запускать собранный двигатель.
@@ВЫ МОЖЕТЕ изменить направление вращения, меняя 2 из этих 3 контактов между двигателем и контроллером.
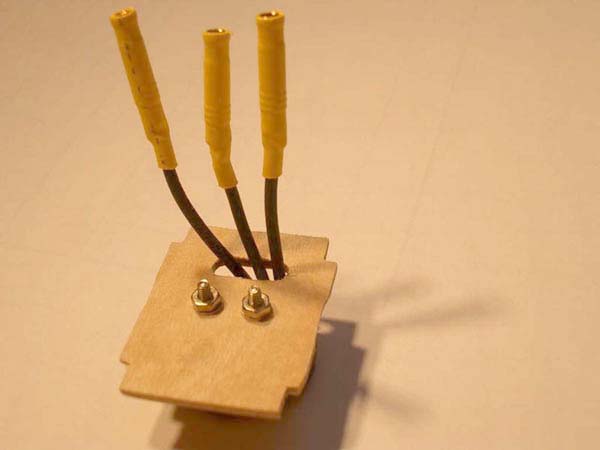

@@Готовые моторы.


Авторам опубликованных статей предоставляются скидки в нашем магазине
Просмотров: 37171
Дата: Вторник, 08 Октября 2013
Синхронные и асинхронные вентильные двигатели постоянного тока широко применяются в различных сферах промышленного производства. В рамках этой статьи мы подробно рассмотрим их устройство и принцип работы.
Обозначения бесколлекторных моторов[править]
бессколлекторных моторов
Часто обозначение бесколлекторного мотора тесно связано с его геометрическими и электрическими параметрами.
Рассмотрим обозначение на примере мотора: Tower Pro 2408-21T
- первые две цифры (24) — обозначают диаметр статора (иногда ротора) в мм
- вторые две цифры (08) — обозначают длину каждого магнита в моторе в мм
- далее может следовать одна или две цифры (21) — это количество витков на каждом зубе статора
- еще бывает в конце буква T (или символ Δ) — обозначающий намотку типа «дельта» («треугольник») ИЛИ буква Y (или символ *) — говорящий о намотке типа «звезда».
При большем диаметре ротора (статора) получается больший крутящий момент, при прочих равных условиях. Длина магнитов, также как и диаметр ротора, влияет на крутящий момент мотора.
С витками работает соотношение: «меньше витки — больше обороты». Если необходимо поставить небольшой винт и получить высокие обороты, то необходимо выбирать мотор с небольшим количеством витков. Если задача крутить большой винт на небольших оборотах (Slow Flyer) — следует выбирать мотор с большим количеством витков.
Литература
Design and Prototyping Methods for Brushless Motors and Motor Control
Вентильные электрические двигатели и приводы на их основе
Овчинников И.Е.
Статьи по бесколлекторным моторам:
- Что такое Бесколлекторный мотор?
- Устройство бесколлекторного мотора
- Как управлять бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Как управлять бесколлекторным мотором без датчиков (Sensorless BLDC)
- Запуск бездатчикового бесколлекторного мотора (Sensorless BLDC)
- Определение положения ротора бесколлекторника в остановленном состоянии
- Контроллер бесколлекторного мотора. Структура ESC
- Схема контроллера бесколлекторного мотора (ESC)
- Силовая часть контроллера бесколлекторного мотора
- Литература по бесколлекторнм моторам
- Примеры на С для управления бесколлекторными моторами
- Схема контроллера бесколлекторного мотора BLDC, PMSM на микроконтроллере STM32
- STM32. Управление бесколлекторным мотором (BLDC)
- STM32. Пример регулятора для бесколлекторного PMSM
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление
Принципы работы
Смотреть галерею
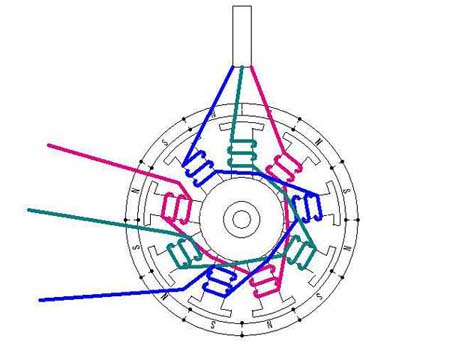
На сегодняшний день становится очень популярным вентильный двигатель, принцип работы которого основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него.
Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора.
Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Работа электродвигателя постоянного тока
Под токосъемником простейшего двигателя две секции. Выродился барабан коллектора. Каждая контактная ламель (пластинка на валу) занимает половину оборота. Одна щетка снабжается положительным потенциалом, вторая – отрицательным, сообразно меняется направление магнитного поля полюсов. Активными в каждый момент времени являются два (в описанной выше конструкции). Статора может формироваться постоянным электрическим полем, либо металлическим магнитом. Последнее применяется детскими машинками.
Как работает электродвигатель постоянного тока. Допустим, в начальный момент времени обмотки расположены так, как показано на рисунке. В нашем примере полюсов уже не два, как обсуждали выше, – три. Минимальное число для стабильного запуска электрического двигателя постоянного тока в нужном направлении. Обмотки соединены схемой звезды, у каждой пары одна общая точка. Напряженность поля формирует два полюса отрицательных, один положительный. Постоянный магнит стоит, как показано рисунком.
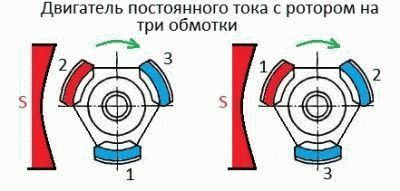
Упрощенный рисунок случая постоянного тока
Каждую треть оборота происходит перераспределение поля так, что полюса сдвигаются согласно изменению напряжения питания на ламелях. На второй эпюре видим: номера обмоток сдвинулись, картина в пространстве осталась. Залог стабильности: один полюс притягивается к постоянному магниту, второй отталкивается. Если нужно получить реверс, меняется полярность подключения батарейки (аккумулятора). В результате получается два положительных полюса, один отрицательный. Вал станет двигаться против часовой стрелки.
Полагаем, принцип действия электродвигателя постоянного тока теперь понятен. Добавим, сегодня распространены двигатели вентильного типа. Многие задумались заставить поля чередоваться на статоре, ротор представлял бы постоянный магнит. В первом приближении двигатель вентильного типа. Постоянный ток подается на нужные обмотки статора через коммутируемые ключи-тиристоры. В результате создается нужное распределение поля.
Преимущества схемы в снижении количества трущихся частей, являющихся причиной необходимости обслуживания, ремонта. Тиристорный блок управления достаточно сложный. Допускается организовать коммутацию при помощи ламелей. Одновременно конструкция послужит грубым датчиком положения вала (плюс минус расстояние между контактными площадками оси вала). Вентильные двигатели не новы. Широко применяются специфическими отраслями. Помогают точно выдержать частоту вращения. В быту вентильные двигатели найти сложно. Некое подобие можно лицезреть в стиральной машине. Речь о помпе слива воды (ротор магнитный, только ток переменный).
Технические характеристики электродвигателей постоянного тока лучше, нежели при питании переменным током. Класс устройств широко применяется. Чаще электродвигатели постоянного тока используются при питании батареями различного рода. Когда нет выбора. Преимущества схемы питания позволят аккумуляторам дольше продержаться.
Обмотки статора, ротора включают последовательно, параллельно. Последнее применяется при нагруженном в исходном состоянии валу. Наблюдается резкое повышение оборотов, может привести к негативным последствиям, если ротор слишком легко идет. Упоминали о подобных тонкостях в теме конструирования двигателей своими руками.
Тестирование работы схемы
Сделайте все необходимые соединения в схеме, загрузите программу в плату Arduino и подайте питание на контроллер ESC. Убедитесь в том, что ваш BLDC двигатель надежно закреплен, иначе он будет прыгать во время вращения. Когда вы подадите питание на контроллер ESC вы услышите приветственный тон и он будет издавать этот звук до тех пор пока не поступит управляющий сигнал заданного уровня (в заданных границах). Начните постепенно вращать ручку потенциометра чтобы на его выходе напряжение стало отличным от 0, и этот звук прекратится. Это будет означать, что вы подали на контроллер ШИМ сигнал минимально допустимого уровня. При дальнейшем вращении ручки потенциометра двигатель начнет медленно вращаться. При дальнейшем повороте ручки потенциометра и увеличении напряжения на его выходе скорость вращения двигателя будет увеличиваться. Когда напряжение достигнет верхней допустимой границы двигатель остановится. В дальнейшем вы можете повторить весь этот процесс заново.