Какой двигатель считается асинхронным
Содержание:
- Скорость вращения поля статора
- Принцип действия [ править | править код ]
- Система управления
- Асинхронные и синхронные двигатели: устройство
- 5.9. ПОТЕРИ И КПД АСИНХРОННОГО ДВИГАТЕЛЯ
- Принцип работы синхронного двигателя
- Подключение асинхронного двигателя
- Что такое асинхронное обучение
- Некоторые понятия теории автоматов
- Как сделать своими руками?
- 5.18.6 Поворотные трансформаторы
- Серводвигатели
- Ротор асинхронного двигателя
- Трехфазный асинхронный двигатель с фазным ротором
- Определение и принцип действия
- КОНСТРУКТИВНЫЕ ОТЛИЧИЯ АСИНХРОННОГО И СИНХРОННОГО ДВИГАТЕЛЕЙ
Скорость вращения поля статора
При питании обмотки статора трёхфазным (в общем случае — многофазным) током создаётся вращающееся магнитное поле, синхронная частота вращения n1{\displaystyle n_{1}} [об/мин] которого связана с частотой питающего напряжения сети f{\displaystyle f} соотношением:
- n1=60fp{\displaystyle n_{1}={\frac {60f}{p}}},
где p{\displaystyle p} — число пар магнитных полюсов обмотки статора.
В зависимости от количества числа пар полюсов возможны следующие значения частот вращения магнитного поля статора, при частоте питающего напряжения сети 50 Гц:
| n, об/мин | p{\displaystyle p} |
|---|---|
| 3000 | 1 |
| 1500 | 2 |
| 1000 | 3 |
| 300 | 10 |
Большинство двигателей имеют 1-3 пары полюсов, реже 4. Большее число полюсов используется очень редко, такие машины имеют низкий КПД и коэффициент мощности, однако позволяют обойтись без редуктора там, где нужна невысокая частота вращения. Например, существуют даже 34-полюсные двигатели 2АСВО710L-34У1 для привода вентиляторов градирен (синхронная частота 176,5 оборотов в минуту).
Принцип действия [ править | править код ]
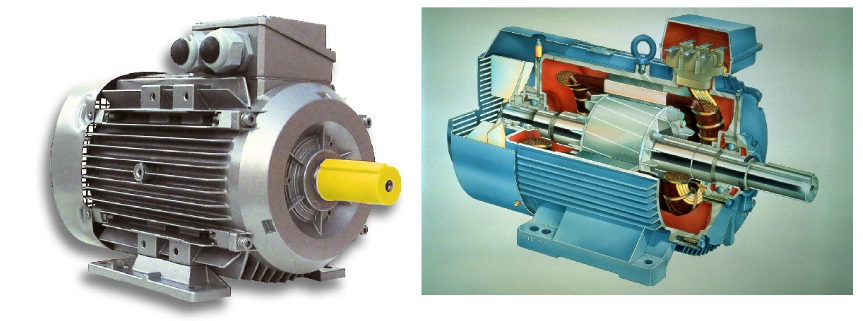
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
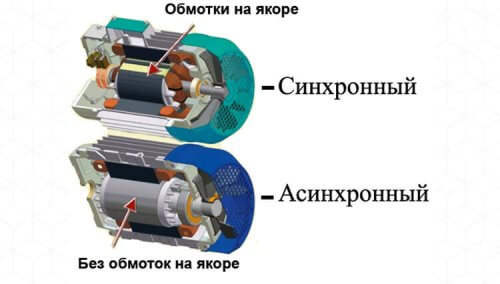
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Система управления
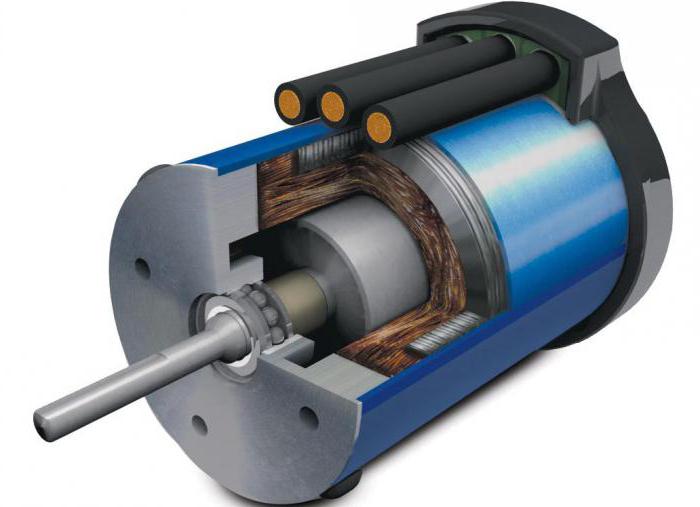
Если электромеханическая часть состоит преимущественно из трех компонентов, в числе которых ротор, статор и несущая конструкция в виде корпуса, то управляющая инфраструктура более сегментирована – количество элементов может достигать нескольких десятков. Другое дело, что их можно поделить на виды. В единственном числе будет представлен только инвертор. Он отвечает за функции коммутации, осуществляя подключение и переключение фаз. Основные же задачи контроля с подачей сигналов выполняют датчики. Главным из них является детектор положения ротора. Кроме этого, в состав управляющего блока вводится и система регуляции сигналов. Это узел с ключами, посредством которого реализуется связь датчиков и электромеханической начинки.
Информацию о позиции ротора обрабатывает микропроцессор. Внешне интерфейс этого блока представляет собой панель управления. На приеме она работает с сигналами широтно-импульсной модуляции (ШИМ-сигнал). Если предусматривается подача низковольтных сигналов, то в управляющем блоке устанавливается и транзисторный мост. Он преобразует сигнал в силовое напряжение, которое в дальнейшем подается на электродвигатель. Наличие датчиков с системой обработки импульсов как раз и отличает управление вентильным двигателем от средств контроля щеточно-коллекторных агрегатов. Другое дело, что возможность внедрения электронной аппаратуры с датчиками допускается и в коллекторных машинах наряду с механическими системами управления.
Асинхронные и синхронные двигатели: устройство
Электрические двигатели представляют собой агрегаты для преобразования электроэнергии в энергию механическую. Основу конструкции двигателя (как синхронного, так и асинхронного типа) составляют следующие элементы:
- неподвижный (статор);
- вращающийся (ротор).
Статоры электродвигателей обеих категорий имеют схожий принцип устройства. В специальные пазы (осевые прорези) уложены токонесущие проводки из меди или алюминия. Функцией статора является создание вращающегося магнитного поля. Ротор (с обмоткой возбуждения) закреплен на валу двигателя и вращается под воздействием возникающей электродвижущей силы.
5.9. ПОТЕРИ И КПД АСИНХРОННОГО ДВИГАТЕЛЯ
В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали
Pсl, а также потери в обмотке статора Рэ1:
Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:
Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Р2‘=Рэм-Рэ2
Воспользовавшись ранее полученной формулой
запишем выражение полной механической мощности:
тогда
или
Рэ2=SРэм,
т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2 меньше полной механической мощности Р2’ на величину
механических Рмех и добавочных Рдоб потерь:
Р2=Р2’-(Рмех.+Рдоб.).
Таким образом:
Р2=Р1-SP,
где
SP=Pсl+Рэ1+Рэ2+Рмех.+Рдоб.
Коэффициент полезного действия
есть отношение мощности на валу P2 к потребляемой мощности P1:
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А
Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
Что такое асинхронное обучение
Асинхронное обучение больше ориентировано на учащихся, поскольку позволяет им проходить курсы без ограничений, связанных с необходимостью находиться в определенном месте в определенное время. Пока у них есть доступ к интернету, асинхронные учащиеся могут свободно изучать материалы курса тогда, когда будет удобно именно им.
Хотя асинхронное обучение не происходит сразу же в какой-то конкретный момент времени, оно все же дает возможность для обратной связи. Учащиеся могут свободно делиться мыслями и вопросами с преподавателями и другими учениками, но стоит иметь в виду, что они могут и не получить немедленного ответа.
-
Обучающие рассылки
-
Блоги экспертов
-
Предварительно записанные видеоуроки или вебинары
-
Интернет-форумы и обсуждения
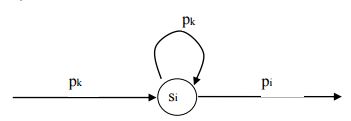
Некоторые понятия теории автоматов
Автомат — абстрактная модель устройства, функционирующего в дискретном времени, которая перерабатывает конечную последовательность входных сигналов (стимулов) и превращает их в конечную последовательность выходных сигналов (реакций).
В процессе работы конечного автомата происходит последовательная смена конечного числа его внутренних состояний, причем состояние автомата в определенный момент времени однозначно определяется входным и выходным сигналами. Такие автоматы представляют собой основу всей современной вычислительной техники и всевозможных дискретных систем автоматического контроля и управления.
|
Определение «Определение — Конечный автомат» |
|---|
| Конечный автомат — математическая модель устройства с конечной памятью. Конечный автомат перерабатывает множество входных дискретных сигналов в множество выходных сигналов. С точки зрения информатики это такие автоматы, которые представляют собой дискретные преобразователи информации. К ним относятся преобразователи, в которых содержится конечное множество входных и конечное выходных сигналов, а также конечное множество внутренних состояний |
Различают синхронные и асинхронные конечные автоматы.
Созданные для практических применений цифровые автоматы всегда являются асинхронными, а устойчивость их состояний всегда обеспечивается тем или иным способом, например, введением сигналов синхронизации. На уровне абстрактной теории, когда цифровой автомат — всего лишь математическая модель, не отражающая многих конкретных особенностей его возможной реализации, часто оказывается более удобным оперировать с синхронными цифровыми автоматами.
В зависимости от того, одновременно или последовательно принимаются входной сигнал и сигнал смены состояний, автоматы делятся на синхронные и асинхронные.
В синхронных автоматах переходы из одних состояний в другие осуществляются через равные временные промежутки, задаваемые обычно генератором тактовых импульсов, в то время как в асинхронных автоматах эти переходы совершаются через неравные между собой промежутки времени.
Для того, чтобы дать определения этим понятиям, необходимо ввести понятие устойчивого состояния.
|
Определение «Определение — Устойчивое состояние» |
|---|
| Устойчивое состояние — такое состояние, для выхода из которого необходим сигнал, отличный от того, что был входным для перехода в текущее состояние.
Состояние si{\displaystyle s_{i}} называется устойчивым, если при переходе в это
|
Как сделать своими руками?
Для начала стоит уточнить, что с нуля создать асинхронную мобильную станцию не получится. Максимум, что можно сделать, – это изготовить ротор без переделки или модернизировать двигатель асинхронного типа в альтернативную конструкцию.
Для проведения работ по модернизации ротора достаточно запастись готовым статором от мотора и провести ряд экспериментов. Главная идея сборки самодельного генератора заключается в использовании неодимовых магнитов. С их помощью удастся обеспечить ротор необходимым количеством полюсов для выработки электрической энергии.
Посредством наклеивания магнитов на заготовку, которую предварительно необходимо посадить на вал, и соблюдения полярности и угла сдвига получится добиться нужного результата. Магнитов потребуется много, минимальное количество составляет 128 штук. Готовая конструкция ротора подгоняется к статору. При выполнении этой процедуры необходимо предусмотреть зазор между зубцами и магнитными полюсами ротора. Он должен быть минимальным.
В процессе важно регулярно охлаждать конструкцию, чтобы предотвратить появление деформаций и утерю магнитных свойств. Если все сделано правильно, то генератор будет работать исправно
В процессе создания асинхронного генератора может возникнуть только одна проблема. В домашних условиях трудно изготовить идеальную конструкцию ротора, поэтому если есть возможность воспользоваться токарным станком, то лучше ею не пренебрегать. Кроме того, на подгонку деталей и их доработку потребуется много времени.
Еще один вариант, с помощью которого можно получить генератор, – это преобразование асинхронного двигателя, используемого в автомобилях. Дополнительно следует приобрести электромагнит, мощность которого будет соответствовать требованиям по отношению к будущему оборудованию. Стоит отметить, что при поиске двигателя нужно учитывать, чтобы его мощность была на половину выше показателя, которого хочется добиться в генераторе.
Чтобы получить нужную конструкцию и организовать ее эффективную работу, потребуется приобрести 3 модели конденсаторов. Каждый элемент должен быть способен выдержать напряжение в 600 и более В.
Реактивная мощность генератора асинхронного типа имеет связь с емкостью конденсатора, поэтому вычислить ее можно по формуле. Стоит отметить, что при повышении нагрузки мощность генератора растет. Таким образом, чтобы добиться стабильного напряжения в сети, потребуется увеличить емкость конденсаторов.
Про принцип работы асинхронного генератора смотрите в следующем видео.
5.18.6 Поворотные трансформаторы
Так называют электрические машины переменного тока,
предназначенные для преобразования угла поворота q в напряжение,
пропорциональное некоторым функциям угла поворота ротора sinq
или cosq, а также самому углу q. Их применяют в вычислительной
технике для выполнения различных математических операций. С помощью поворотных
трансформаторов решают геометрические задачи, связанные с построением треугольников,
преобразованием координат, разложением и построением векторов. В системах автоматического
регулирования поворотные трансформаторы используют в качестве измерителей расстояния,
фиксирующих отклонение системы от некоторого определенного положения.
Конструктивно поворотный трансформатор представляет
собой асинхронную машину малой мощности. На статоре ее перпендикулярно размещены
две обмотки: C1-C2 и С3-С4.
Первая получила название главной, а вторая — квадратурной. Обмотки статора выполняются
одинаковыми, т.е. с одинаковым числом витков. На роторе может быть одна обмотка,
но чаще их бывает две. На рис. 5.18.6.1. приведены схемы включения синусного,
косинусного и синусно-косинусного поворотных трансформаторов.
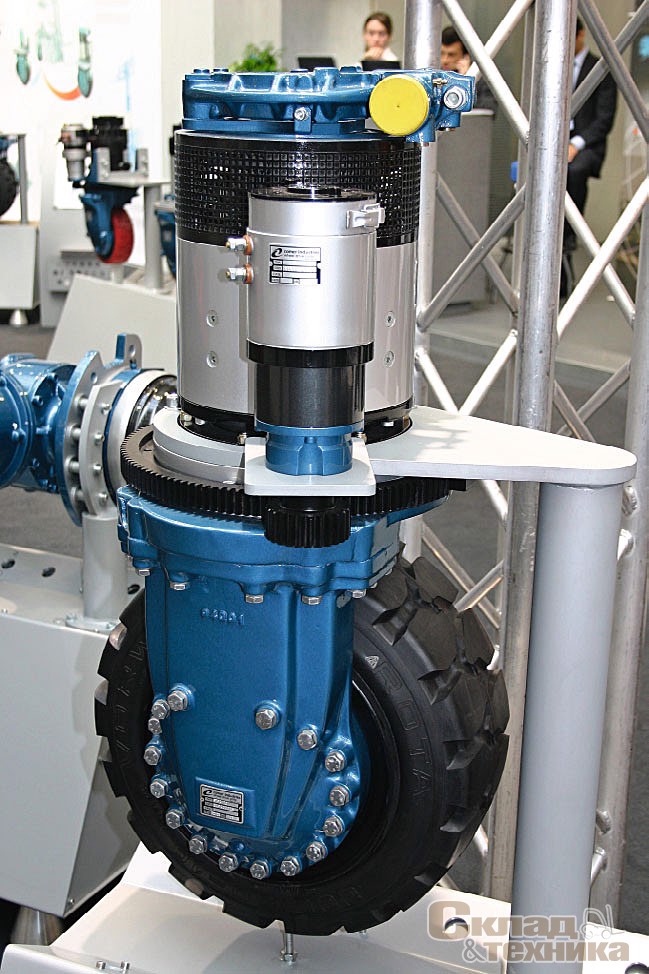
Серводвигатели
Эти двигатели занимают свою особую нишу – они работают в оборудовании, где требуется точное регулирование положения и скорости движений. Эти устройства специально разработаны как электродвигатели с якорем малого диаметра, но развивающие высокий крутящий момент. Чем меньше якорь, тем меньше инерция и, следовательно, электродвигатель быстрее разгоняется, и машина работает быстрее.
Серводвигатели оснащают также системами управления по обратной связи: по сигналам тахометра, датчиков линейных перемещений и аналого-цифрового преобразователя (АЦП). Благодаря управлению по сигналам от этих приборов увеличивается точность движений и регулирования скорости машин. Серводвигатели применяют в оборудовании и системах, где требуется высокая точность движений: в роботизированном оборудовании, штабелерах и подобных складских машинах. Электродвигатели этого типа применяют также в оборудовании и системах, где необходима большая точность синхронизации – в машинах, выполняющих установку (позиционирование) грузов на стеллажах автоматизированных складов.

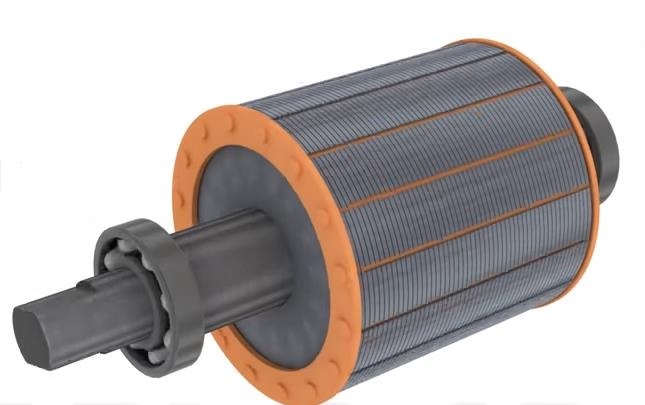
Ротор асинхронного двигателя
Давайте более подробно рассмотрим, из чего же состоит ротор асинхронного двигателя.
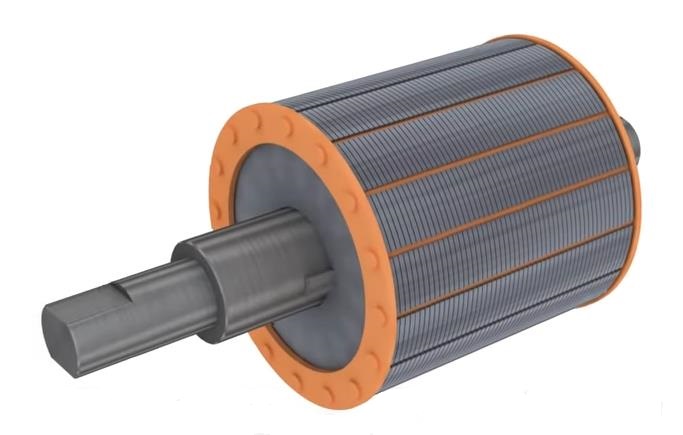
Самая главная часть – это вал. Иначе, как бы происходило вращение?

На вал ротора с двух сторон надеваются подшипники, которые крепятся к передней и задней крышкам и центруют ротор ровно посередине статора.

Далее идет сердечник, набранный из листов специальной электротехнической стали, которые изолированы друг от друга. Кстати, сетевые трансформаторы собираются из такой же стали.
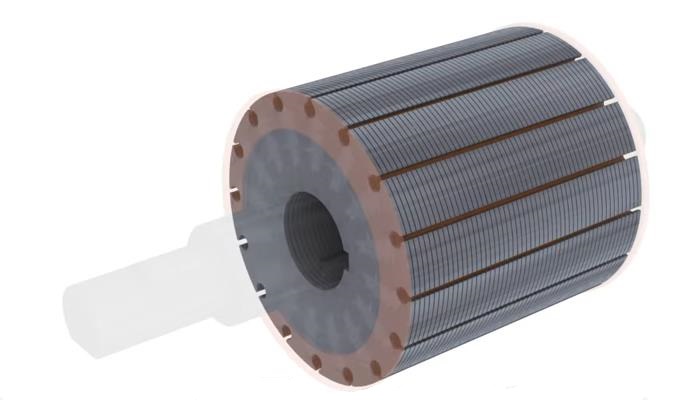
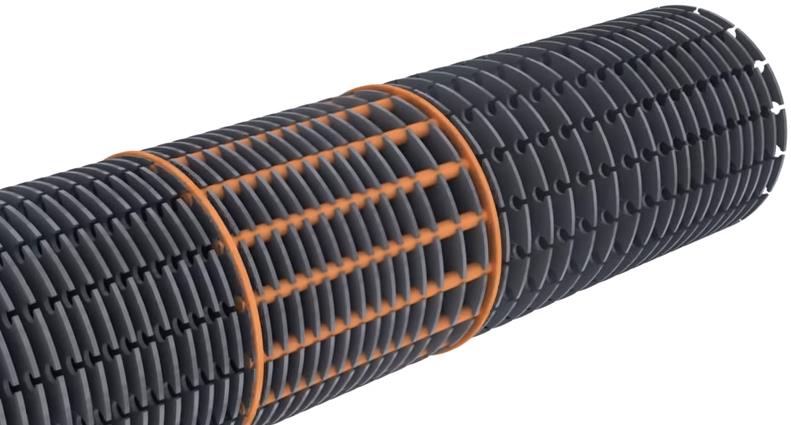
Как вы можете далее заметить, в сердечнике ротора есть специальные пазы
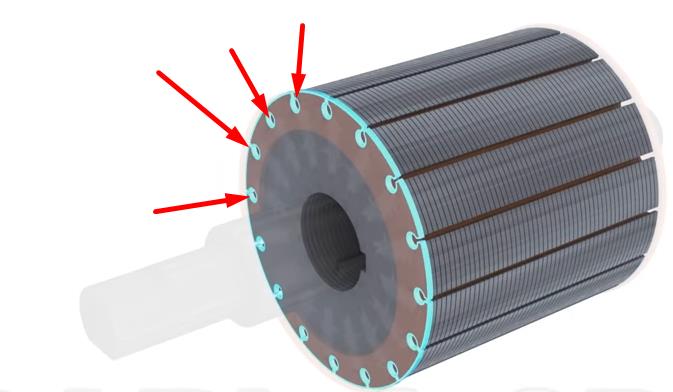
В них вставляются медные или алюминиевые стержни,
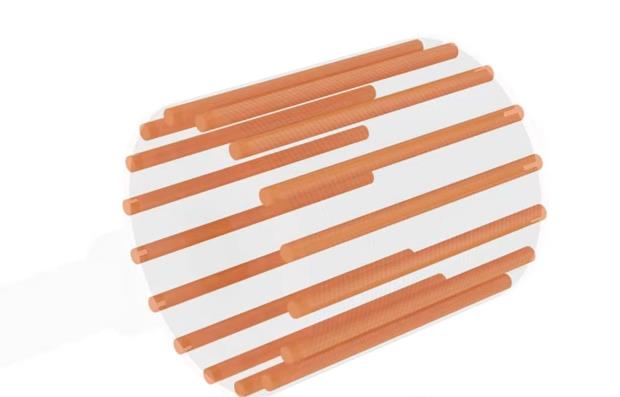
которые замыкаются на кольцо с обеих сторон, образуя так называемую “беличью клетку”.

В общем виде полностью собранный ротор асинхронного двигателя выглядит вот так.
А вот так он выглядит в реальном двигателе.

Всегда помните, что в асинхронном двигателе вращается ротор, а не статор. Статор – это неподвижная часть, а ротор – подвижная часть электродвигателя. В рабочем состоянии двигателя между ротором и статором всегда имеется воздушный зазор. При работе двигателя ротор ни в коем случае не должен задевать статор двигателя.

Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
КОНСТРУКТИВНЫЕ ОТЛИЧИЯ АСИНХРОННОГО И СИНХРОННОГО ДВИГАТЕЛЕЙ
Основные различия заключаются в конструкции роторных обмоток и принципе возникновения вращающего момента.
Асинхронный двигатель.
Роторная обмотка АД может быть замкнутой накоротко («беличья клетка»), либо через подключаемые дополнительные сопротивления, находящиеся вне двигателя.
Первый тип называют «электродвигателем с короткозамкнутым ротором», второй — «с фазным ротором». Дополнительные сопротивления в фазной роторной обмотке служат для облегчения запуска, по завершении которого шунтируются.
Блок сопротивлений соединяется с обмоткой фазного ротора скользящими контактами коллекторного механизма. Асинхронный двигатель с «беличьей клеткой» не имеет коллектора.
При подаче напряжения на обмотку статора, создаётся круговое магнитное поле, вращение которого вызывает появление ЭДС индукции и соответственно, ток в стержнях «беличьей клетки».
По закону Ампера на каждый стержень с током в магнитном поле статора действует сила, направленная перпендикулярно стержню, то есть, по касательной к поверхности ротора, которая и создаёт вращающий момент.
ЭДС индукции и ток в обмотке ротора возникают только при различии частоты, с которой вращается вал двигателя и магнитное поле статора.
Поэтому в асинхронном двигателе частота вращения поля всегда больше частоты вращения вала двигателя. Отсюда и название — асинхронный двигатель.
Синхронный двиратель.
На индукторе синхронного двигателя переменного тока располагается обмотка возбуждения, которая питается от стороннего источника постоянного тока через коллекторный механизм.
Для облегчения запуска электродвигателя на его роторе также располагается короткозамкнутая «беличья клетка», которую называют демпферной обмоткой.
Круговое поле статора вызывает появление силы Ампера, действующей на обмотку возбуждения. Но поскольку ток возбуждения СД не зависит от магнитного поля статора, а создаётся внешним источником, его индуктор раскручивается до частоты вращения поля. Поэтому двигатель называется синхронным.
Пуск производится с помощью демпферной обмотки в асинхронном режиме, обмотка возбуждения при этом отключена. Когда частота вращения достигает асинхронной, подаётся ток возбуждения и частота возрастает до синхронной величины.